


הסבר על PID - ולינקים למדריכים
מה זה לכל הרוחות PID
PID אלו ערכים מספריים המוגדרים בתוכנת בקר הטיסה, המכתיבים כיצד הבקר מייצב את הרחפן, באיזה אופן
כמה חריף ומהר. ייצוב הרחפן זה בעצם תיקון "טעויות" (טעות יכולה להיות משב רוח או תת לחץ שגורמים לרחפן לסטות מהמצב הרצוי) והבקר צריך להגיב, באיזה אופן הוא מגיב (כמה חריף, מהר, מדוייק ואסרטיבי) כאן נכנסים ערכי הPID לביטוי.
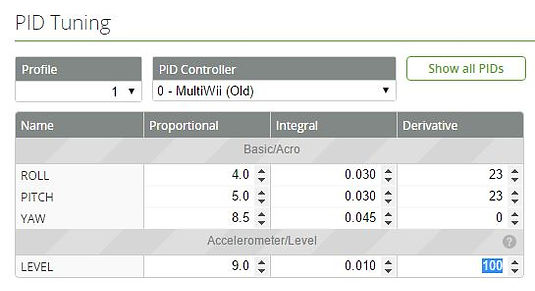
ממשק כיוון PID בתוכנת CleanFlight
למה חשוב לכוון PID וכיצד עושים את זה ?
כאשר ה-PID שלנו מכוון כמו שצריך, התנהגות הרחפן תושפע מכך ויהיה לנו רחפן מדוייק ו"נעול".
נושא ה-PID הוא עצום, ויש אינספור איפורמציה ומדריכים כיצד לכוון PID.
בגדול ישנו את הכיוון הראשוני לפי פרוצדורה כללית שהיא די זהה ומשותפת לכל המדריכים שעברתי עליהם.
לאחר מכן הכיוון השני המאתגר יותר, מטרתו להגיע לערכים המדוייקים והמושלמים, שזה מאוד קשה (FINE TUNE).
כדי שתוכלו לכוון PID תוך כדי טיסה הכנתי מדריך בנושא
כיצד להגדיר את ה-CLEANFLIGHT ושלט הרדיו לכיוון PID תוך כדי טיסה
פרוצדורת כיוון PID - כללית
* ערכי PID משתנים בין רחפנים בעלי סטאפים שונים, משקלים שונים, מנועים, בקרים, חלוקת מסה וכדומה.
1) מתחילים בערכי ברירת המחדל (לפעמים זה קרוב לתוצאה הרצוייה)
2) מורידים מעט מערכי ברירת המחדל (30 אחוז פחות לצורך העניין)
כיוון PID נעשה בטיסה בשטח פתוח מעל דשא במצב LOS (שאנו מסתכלים על הרחפן)
ערך P - עובדים עם כל ציר בנפרד (תחילה ROLL אחר כך PITCH)
* עוזר מאוד לתת תזוזות סטיק ימינה שמאלה (לציר ה-ROLL) או קדימה אחורה (לציר ה-PITCH) בכדי להבחין ברעידות המזעריות.
1) מעלים את ערך P עד שמזהים רעידות בתדירות גבוהה (אוסילציות מהירות)
2) כעת נוריד את ערך P (מומלץ להוריד כ 20 עד 30 אחוז ברגע שזיהינו רעידות)
3) כעת חוזרים על הפעולות בציר השני (PITCH)
ערך I - עובדים עם כל ציר בנפרד (תחילה ROLL אחר כך PITCH)
* עוזר מאוד לתת תזוזות סטיק ימינה שמאלה (ROLL) או קדימה אחורה (PITCH) בכדי להבחין ברעידות המזעריות.
1) מעלים את ערך I עד שמזהים רעידות בתדירות נמוכה (אוסילציות איטיות)
2) כעת נוריד ערך I (מומלץ להוריד כ 20 עד 30 אחוז ברגע שזיהינו רעידות)
3) כעת חוזרים על הפעולות בציר השני (PITCH)
בדיקה נוספת לערך ה I (חשוב שדה פתוח ורחב)
1) להעביר למצב ידני(MANUAL)
2) נתחיל בציר הROLL: נותנים הטייה לכיוון ימין (45 מעלות) עוזבים את הסטיק ונותנים לו להיסחף
3) המטרה היא לבדוק האם הוא שומר על ההטייה, אם הרחפן נסחף חזרה למצב שטוח צריך להוסיף I
* לנסות את אותם הפעולות גם לכיוון שמאל
4) כעת נבצע את אותה בדיקה על ציר ה-PITCH: נותנים הטייה קדימה (45 מעלות) עוזבים סטיק
ומתבוננים האם הרחפן שומר על ההטייה או האם יש סחיפה.
* במידה ויש סחיפה מעלים את ערך ה-I בציר ה-PITCH.
ערך D - כאשר אנחנו מנדנדים את הרחפן בשני הצירים (ROLL PITCH) תנועות סטיק חדות ומהירות,
לאחר עזיבת הסטיק הרחפן צריך לעצור בצורה חדה, ללא נדנודים בסוף התנועה ללא OVERSHOOT !
אם העצירה לא חדה ומדוייקת, נסו להעלות את ערך D עד שהוא יהיה חד וחלק (כמובן על שני הצירים: PITCH - ROLL)
ערך D משפיע על P ובעצם יכול להחליק את התיקון של בקר הטיסה.
קווים מנחים לפי המדריך של בוריס
- המטרה להגיע לP הגבוה ביותר האפשרי (ללא רעידות ותיקוני יתר)
- ה D צריך להיות נמוך ככל הניתן (אך עדיין משמעותי מספיק בשביל לתקן את ה OVERSHOOT)
- בעצם ה D וה-I רק תומכים ומתקנים את ה"שאריות" שערך ה P אינו מצליח להחליק.
בהצלחה